东南大学这门机器人课,教会你玩转智能机械的核心技术
内容简介:作为国内顶尖工科院校的精品课程,东南大学推出的《机器人原理及应用(共48讲)》堪称机器人领域的通关秘籍。去年带学生做过机械臂项目时,发现很多问题都能在这门课里找到答案。
 - 机械臂控制")
为什么说这门课特别实用?
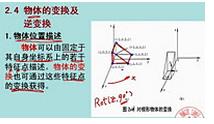
搞机器人不是简单的编程或机械设计,需要融会贯通七八个学科的知识。课程从最基础的数学工具开始,比如我刚讲完齐次坐标变换这部分,学生马上就能用它解决机械臂位姿标定的实际问题。
特别要提的是动力学补偿环节,去年有个做物流分拣机器人的小组,就是靠着课程里的惯性张量计算方法,成功解决了高速运动时的振动问题。
适合哪些人来学习?
适合三类人群:
- 在校生:机械/自动化专业必修,计算机专业拓展视野
- 工程师:解决工业机器人调试中的具体问题
- 创业者:了解服务机器人的核心技术门槛
 - 机器人传感")
课程核心内容详解
前12讲打基础特别重要,会系统讲解旋量理论、D-H参数法这些"看家本领"。记得有个做机器人比赛的学生,原来总搞不清运动学逆解,听完连杆坐标系建立那讲后直呼"顿悟"。
中间20讲是精华所在,像我们用Adams做动力学仿真时,课程里的拉格朗日方程建模方法可以直接套用。传感器部分还会剖析力矩传感器的内部构造,这个在市面上很多课程里都是略讲的。
完整课程目录
基础篇(1-16讲)
- 机器人学数学基础(齐次变换、旋量理论)
- 机械臂正逆运动学解析
- 运动轨迹规划方法与实现
进阶篇(17-32讲)
- 刚体动力学建模(牛顿-欧拉方程)
- 机器人控制策略(PID/力混合控制)
- 多传感器信息融合技术
 - 智能控制")
实战篇(33-48讲)
- 工业机器人典型应用案例
- 服务机器人导航与SLAM
- 前沿技术展望(柔体机器人等)
建议边学边做实验,我们实验室的UR5机械臂平台就能验证很多课上的算法。遇到逆运动学奇异点问题的时候,不妨回头看看第24讲的特殊位形处理方法。
这门课最大的优势是把深奥的理论转化成了可落地的技术方案,去年毕业设计的同学里有好几个靠课程里的内容拿到了大厂offer。期待你也能从中获得真本事!